 https://stackoverflow.com/questions/20517989
https://stackoverflow.com/questions/20517989
 italiano
italiano english
english français
français española
española 中国
中国 日本の
日本の العربية
العربية Deutsch
Deutsch 한국어
한국어 Português
Português Russian
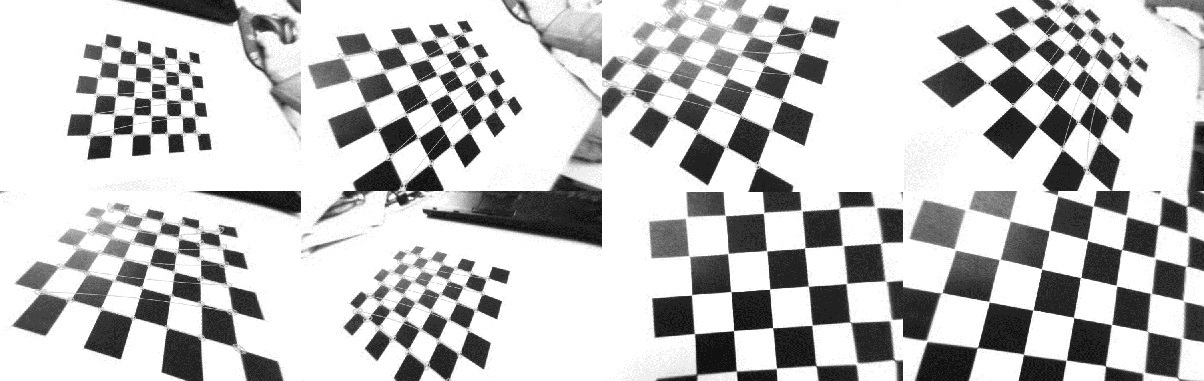
RussianAll chessboard corners should be visible to be found. The algorithm expect a certain size of chessboard such as 4x3 or 7x6 (for example). The white border around a chess board should be visible too or dark squares may not be defined precisely.
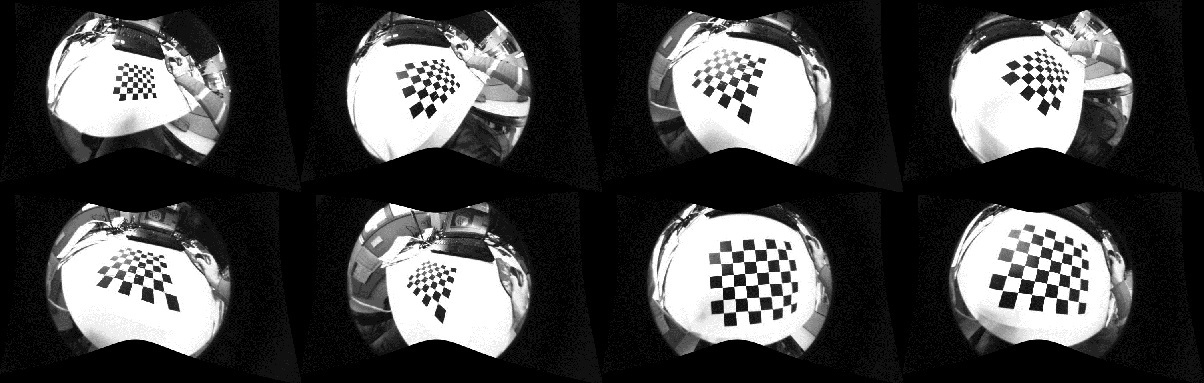
You still have high distortions at the image periphery after undistort() since distortions are radial (that is they increase with the radius) and your found coefficients are wrong. The latter are wrong since a calibration process minimizes the sum of squared errors in pixel coordinates and you did not represent the periphery with enough samples.
TODO: You have to have 20-40 chess board pattern images if you use 8 distCoeff. Slant your boards at different angles, put them at different distances and spread them around, especially at the periphery. Remember, the success of calibration depends on sampling and also on seeing vanishing points clearly from your chess board (hence slanting and tilting).

{kind=link}
{kind=link}
{kind=link}
{kind=link}